
NATCAR
Published:
Along with Max Barreto and Felix Li, I built and developed a competitive NATCAR for spring 2014. Our car eventually placed 6th (barely) in the NATCAR competition held at UC Davis. With the exception of the car chassis, many of the things on our car was built and designed by us. The camera mount was manufactured and designed by Max. I came up with the team name, did the controls while Felix wrote much of the low level software that interacted with our sensors and actuators.
We were one of 30-40 undergraduate teams that congregated in UC Davis for NATCAR on a weekend. There were many practice tracks available before the official races began. During this time, many teams made final calibration adjustments to make sure their sensing and control algorithms worked for the track.

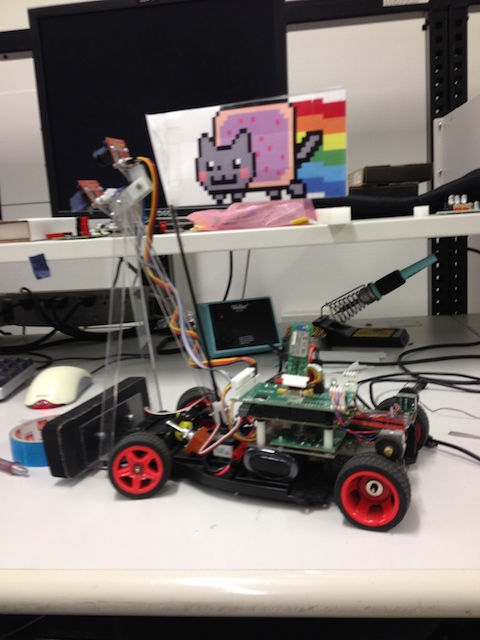

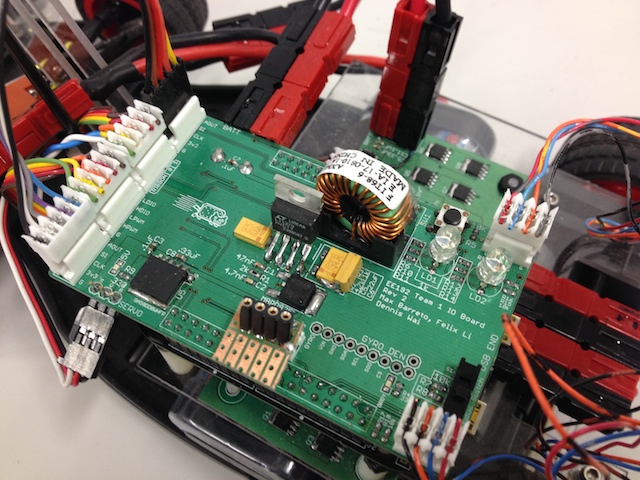
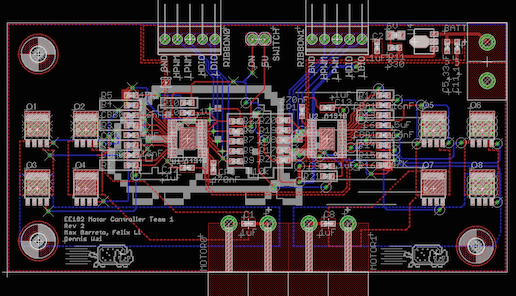
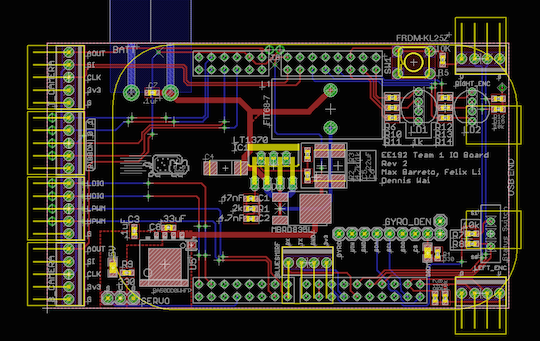
We had to design our own motor controller and breakout shield for the Freedom KL25Z. I couldn’t resist putting a Nyan cat decal on our boards. Our motor controller, which possessed two full bridge driven by the Allegro A4940 high side driver. This board would pair with the IO board to provide actuation. We also fabbed a shield for the Freescale Freedom KL25Z ARM microcontroller and it had the ability to communicate with two camera, two encoders, and two motors. It also has a regulated 5V for servos and a boosted 7.2V rail to prevent battery voltage dropout. Also, it can’t be high tech unless there are tri-LEDs to report user-set statuses.
For an summary of how we felt about our project, you can view our final presentation here.