Baxter Robot and Blocks
Published:
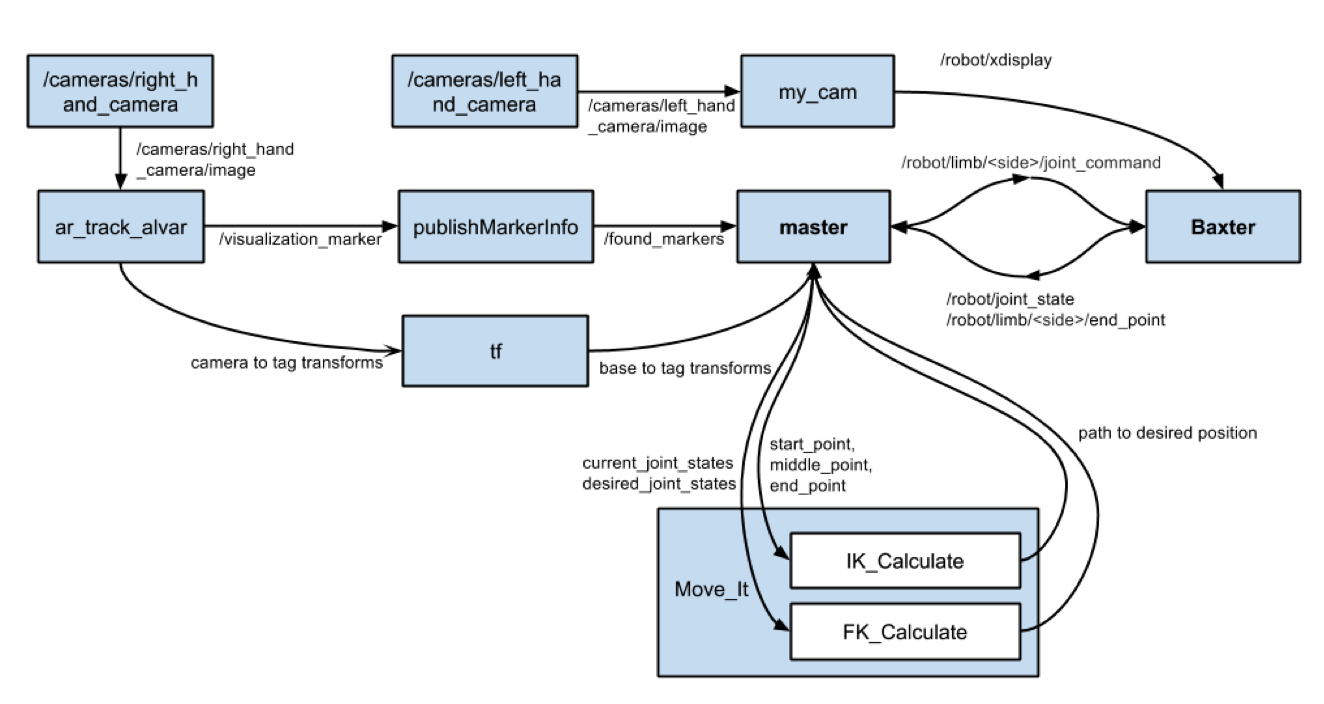
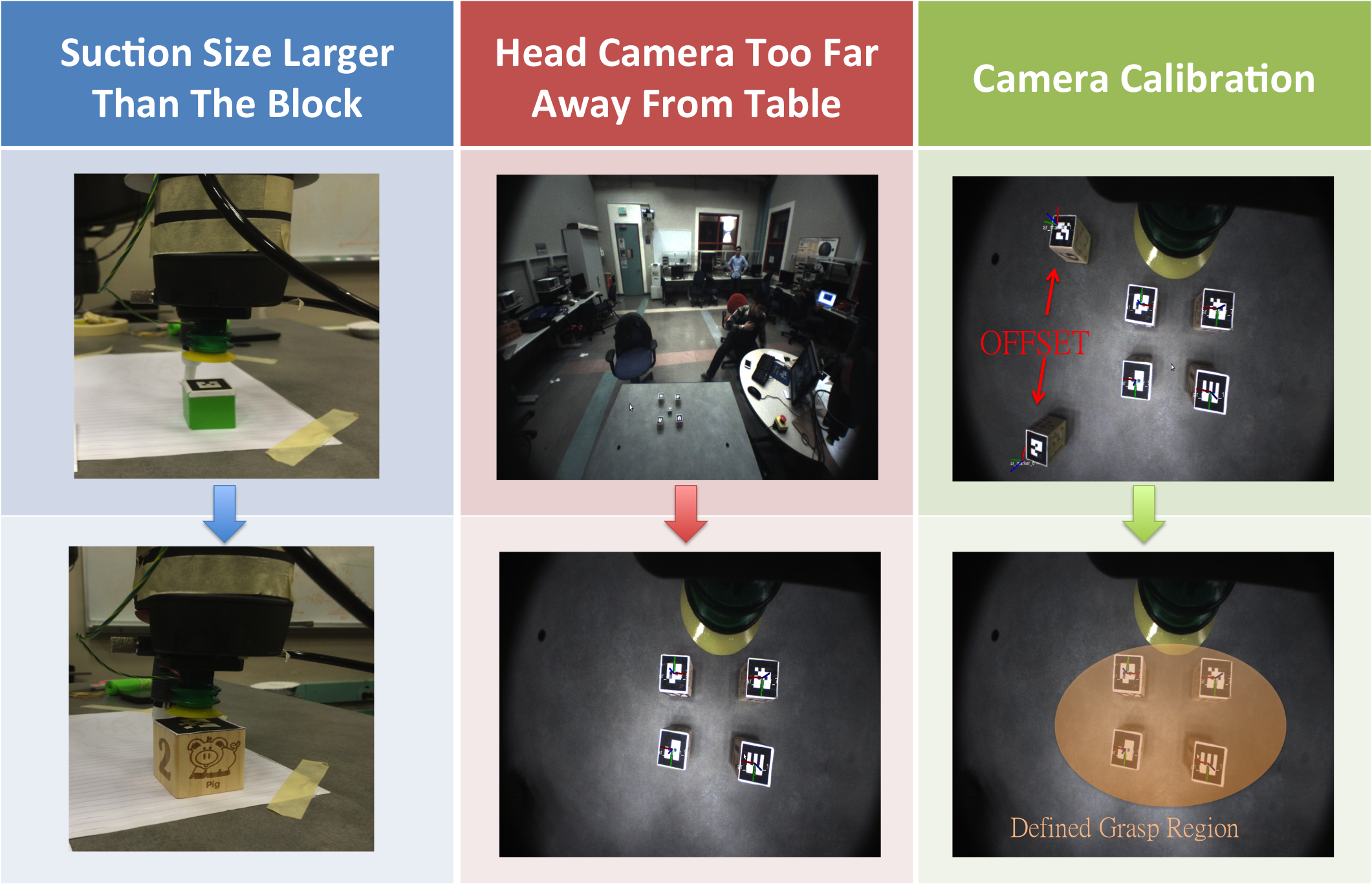
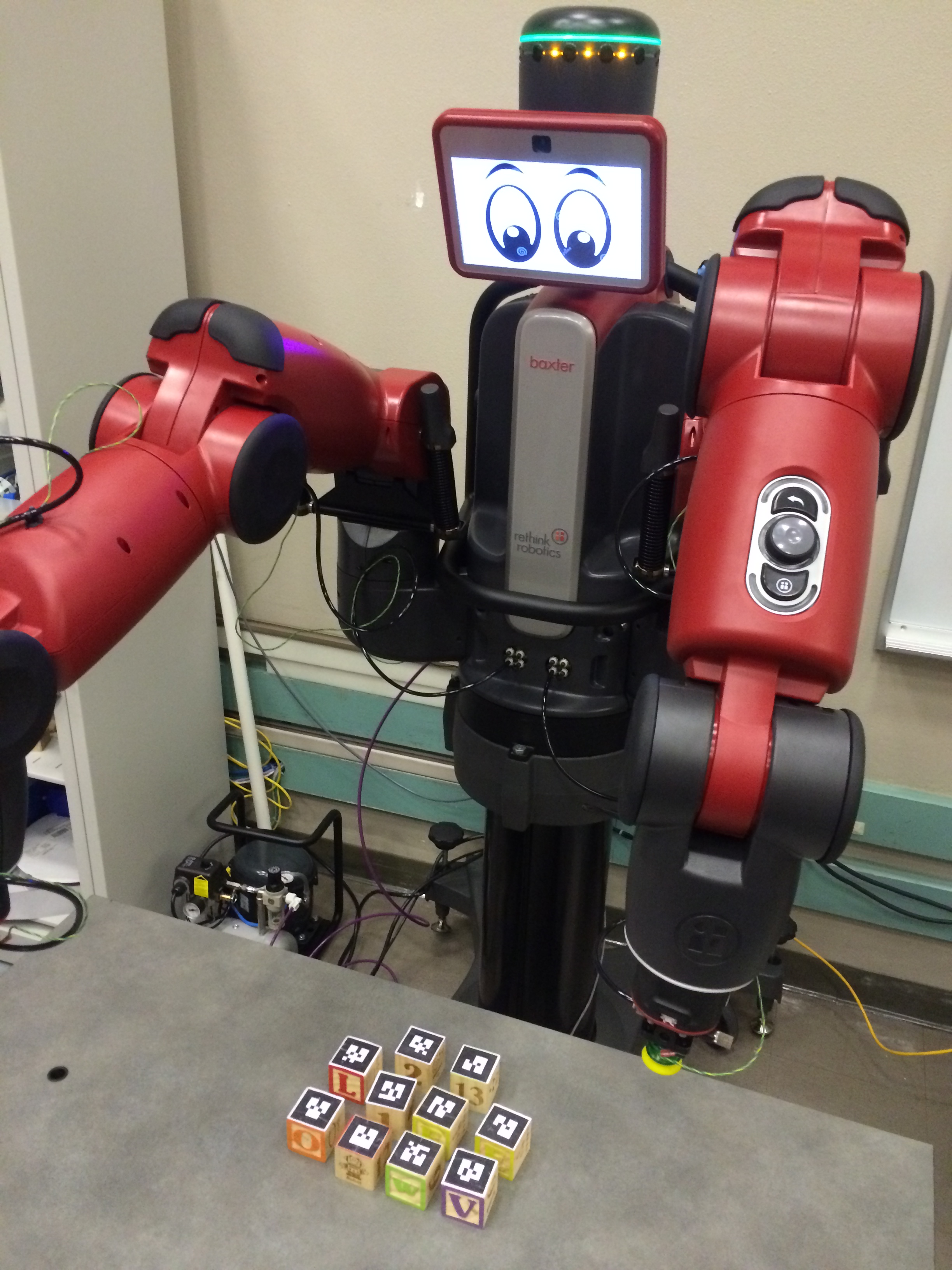
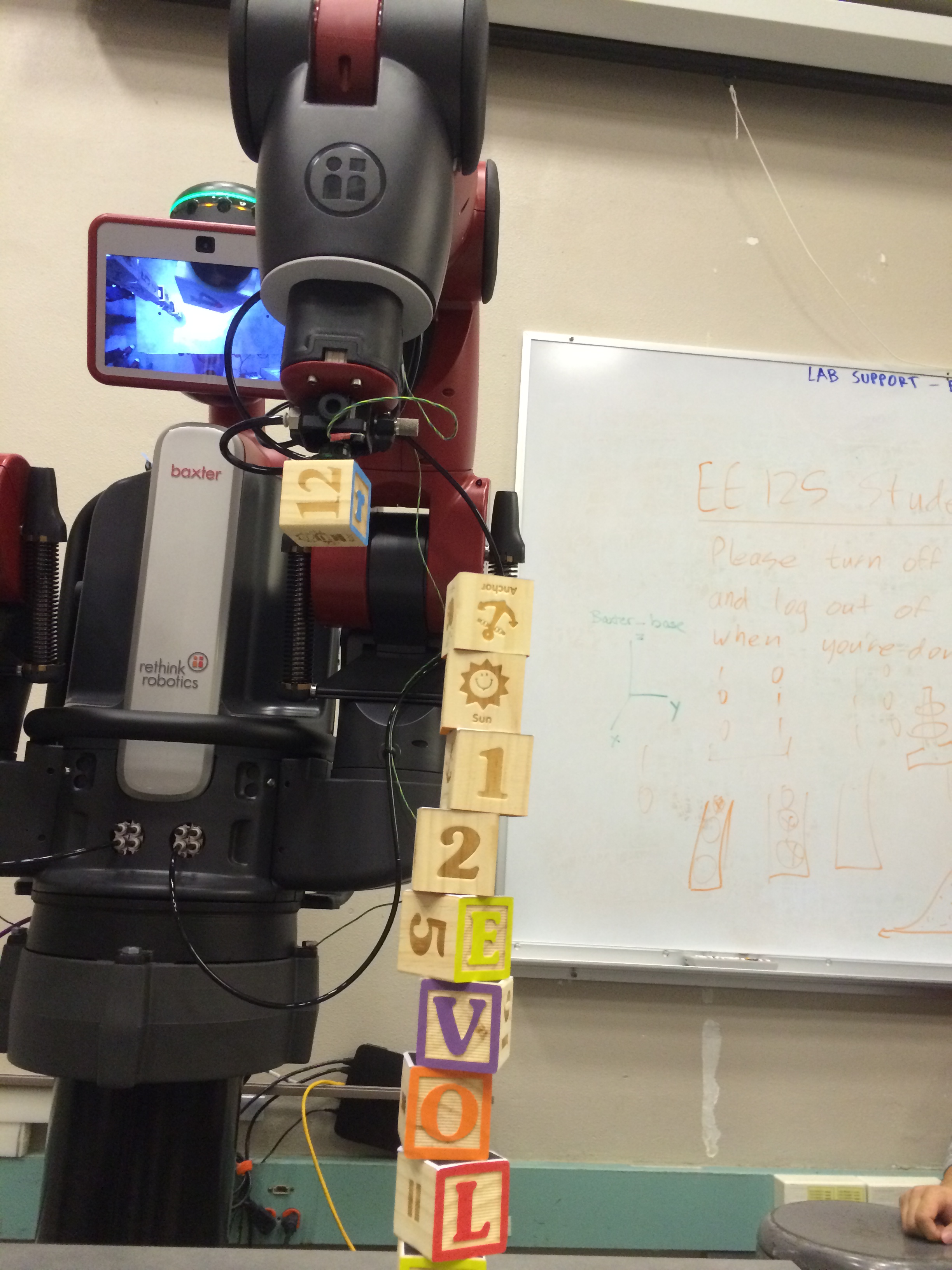
Baxter from Rethink Robotics is an robot platform that Te Tang, Hsien Chung Lin, and I worked on so that we can detect toy blocks and then stack them. Powered by ROS, AprilTags and some elbow grease, we successfully implemented block stacking on Baxter. The following slideshow will provide overviews and problem resolutions for our project.
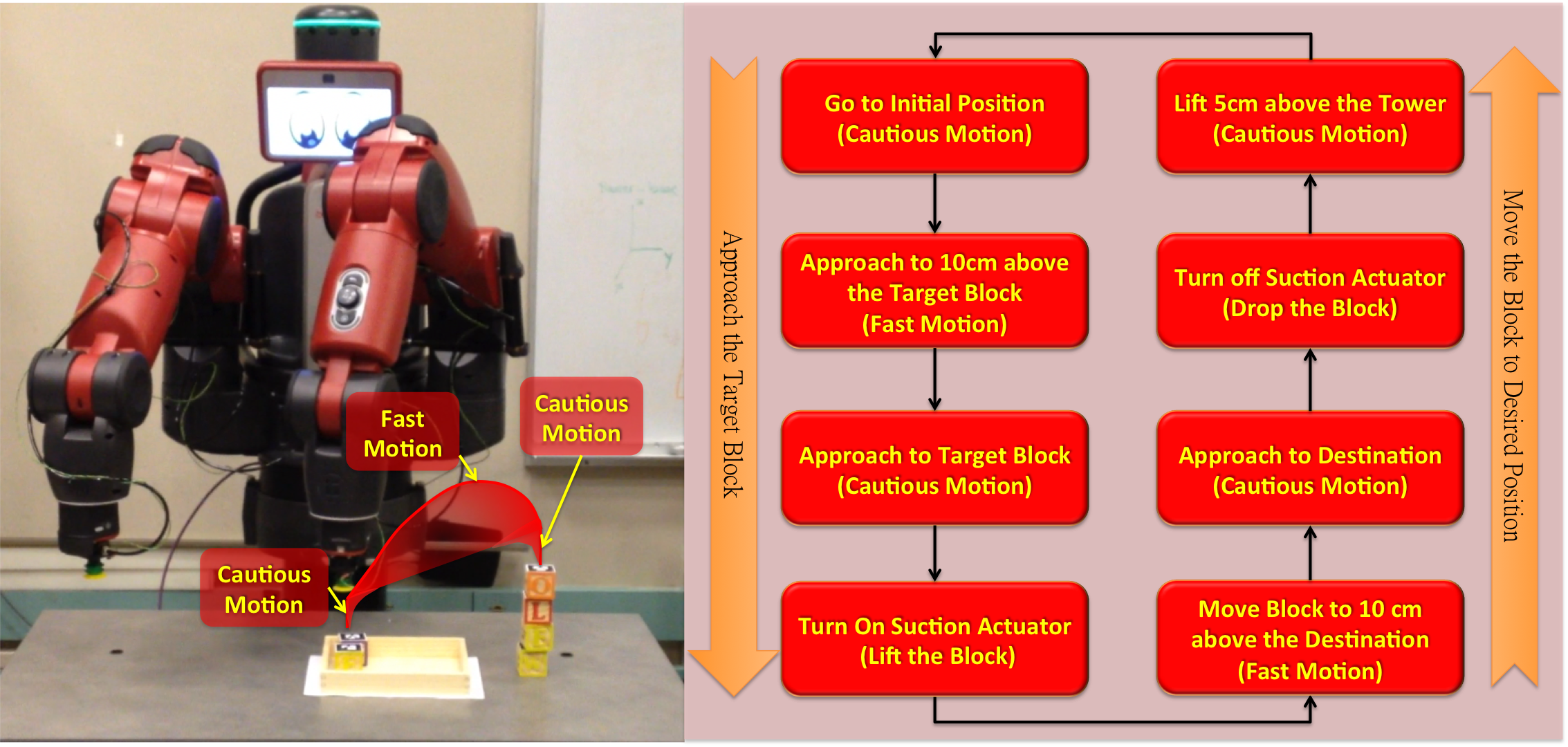
Baxter needs its toy blocks resting on a flat surface about 3 feet away from its head. Each of the toy blocks (a 1 inch cube) is prelabeled with a AprilTag for unique identification. Then, Baxter will follow a preprogrammed kinematic path to stack the blocks.

For a full discussion on our project, check out our code on Github and our project website.