
Projects
Bike Odometer
Published:
Tellaride is an intelligent Bike Odometer system that Jon Silberstein, Casey Duckering, and I designed and built. It is a motion sensor that sits within a bike wheel and pairs with an iPhone app so that a biker can get realtime feedback on their bike ride. Computed kinematic quantities, like speed and altitude, are sent and saved on a cloud server. The biker can also formulate natural English queries on the iPhone that can then be reformulated as STL formulas and evaluated by a STL checker running on a cloud server. Read more
Baxter Robot and Blocks
Published:
Baxter from Rethink Robotics is an robot platform that Te Tang, Hsien Chung Lin, and I worked on so that we can detect toy blocks and then stack them. Powered by ROS, AprilTags and some elbow grease, we successfully implemented block stacking on Baxter. The following slideshow will provide overviews and problem resolutions for our project. Read more
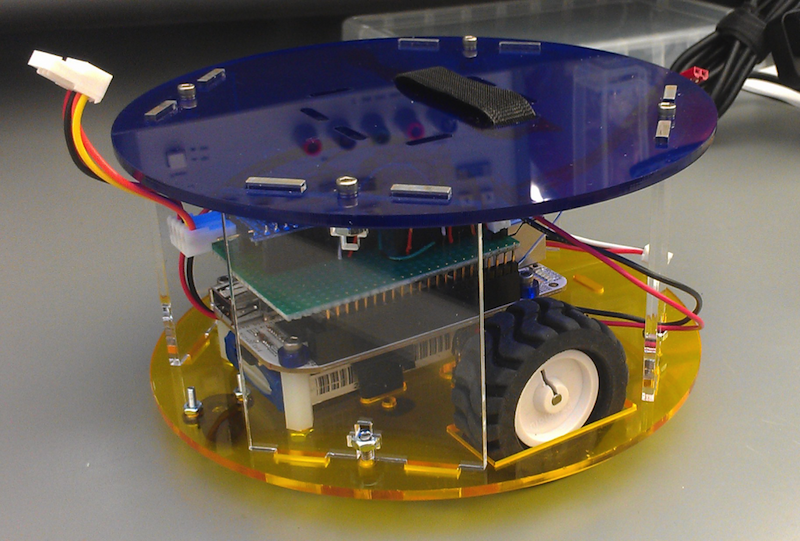
Networked Swarm
Published:
For the senior level design course, ME102b, I worked with Robert Luan, Stephen Chen, Jared Porter, and Ben Yee to design and fabricate a fleet of robots that, through computer vision, would arrange itself to form certain formations. Visual feedback information (orientation and position) is provided via APRIL tags and a potential function is used to avoid agent to agent collision.
Relativistic Orbits
Published:
ME275 is the first grad class I have taken at Cal and the third class I have taken with Professor O’Reilly. ME275’s course title is Advanced Dynamics and delves into Lagrangian and Hamiltonian equations of motion. The course culminates into an individual project that further explores a concept previously learned in class. Read more
Ball on a Plate
Published:
Robert Luan, Stephen Chen and I spent about five hours over dinner before we finally decided that we were going to build a ball on a plate, a system that aims to control the position of a ball on a square plate through feedback control. For plate actuation, we used two TowerPro servos on two independent axes below the plate (below). Although we initially used a ping pong ball for our system, we ended up choosing smaller metal ball bearings. Our plate was a polycarbonate/black foam PVC sandwich and it sits underneath an overhanging Logitech C520 webcam. Read more
Foamboard Catapult
Published:

